Toyota CH-R: Blind Spot Monitor operation
■ Objects that can be detected while driving
The Blind Spot Monitor uses rear side radar sensors to detect the following vehicles traveling in adjacent lanes and advises the driver of the presence of such vehicles via the indicators on the outside rear view mirrors.
- Vehicles that are traveling in areas that are not visible using the outside rear view mirrors (the blind spots)
- Vehicles that are approaching rapidly from behind in areas that are not visible using the outside rear view mirrors (the blind spots)
■ Detection range while driving
The areas that vehicles can be detected in are outlined below.
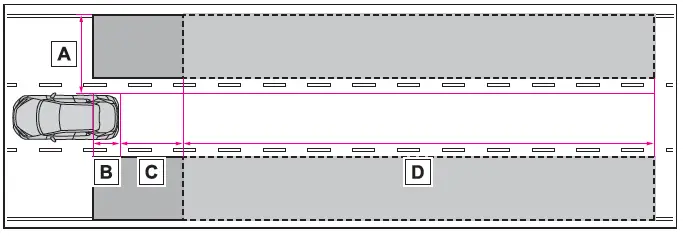
The range of each detection area is:
- Approximately 0.5 m (1.6 ft.) to 3.5 m (11.5 ft.) from either side of the vehicle*1
- Approximately 1 m (3.3 ft.) forward of the rear bumper*2
- Approximately 3 m (9.8 ft.) from the rear bumper
- Approximately 3 m (9.8 ft.) to 70 m (230 ft.) from the rear bumper*3
*1: The area between the side of the vehicle and 0.5 m (1.6 ft.) from the side of the vehicle cannot be detected.
*2: While the vehicle is to being overtaken, up to approximately 3 m (9.8 ft.) forward of the rear bumper will be detected.
*3: The greater the difference in speed between your vehicle and the detected vehicle is, the farther away the vehicle will be detected, causing the outside rear view mirror indicator to illuminate or flash.
■ The Blind Spot Monitor linked function
The LDA (Lane Departure Alert) has a function that uses information of detected vehicles driving in an adjacent lane. For details about the function and its operating conditions.
■The Blind Spot Monitor is operational when
The Blind Spot Monitor is operational when all of the following conditions are met:
- The power switch is in ON.
- The Blind Spot Monitor is on.
- The shift position is in a position other than R.
- The vehicle speed is approximately 10 km/h (7 mph) or more.
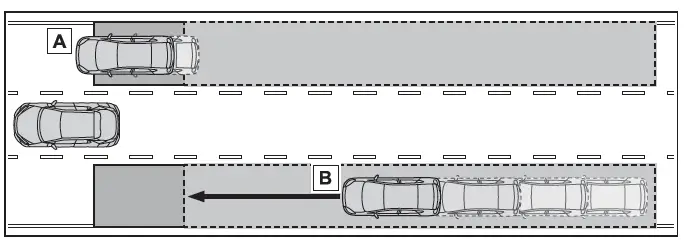
■The Blind Spot Monitor will detect a vehicle when
The Blind Spot Monitor will detect a vehicle present in the detection area in the following situations:
- A vehicle in an adjacent lane overtakes your vehicle.
- You overtake a vehicle in an adjacent lane slowly.
- Another vehicle enters the detection area when it changes lanes.
■Situations in which the Blind Spot Monitor cannot detect vehicles
The Blind Spot Monitor cannot detect the following vehicles and other objects:
- Small motorcycles, bicycles, pedestrians, etc.,*
- Vehicles traveling in the opposite direction
- Guardrails, walls, signs, parked vehicles and similar stationary objects*
- Following vehicles that are in the same lane*
- Vehicles traveling 2 lanes away from your vehicle*
- Vehicles which are being overtaken rapidly by your vehicle*
*: Depending on the conditions, detection of a vehicle and/or object may occur.
■Conditions in which a buzzer may not sound
In situations such as the following, while the turn signal lever is being operated, the indicator will flash but a buzzer may not sound.
- When a second vehicle is detected while the turn signal lever is being held
- When overtaking a vehicle in the adjacent lane at a much higher speed than it*
*: Depending on the situations, a buzzer may sound.
■Conditions under which the system may not function correctly
- The Blind Spot Monitor may not detect
vehicles correctly in the following situations:
- When the sensor is misaligned due to a strong impact to the sensor or its surrounding area
- When mud, snow, ice, a sticker, etc., is covering the sensor or surrounding area on the rear bumper
- When driving on a road surface that is wet with standing water during bad weather, such as heavy rain, snow, or fog
- When multiple vehicles are approaching with only a small gap between each vehicle
- When the distance between your vehicle and a following vehicle is short
- When there is a significant difference in speed between your vehicle and the vehicle that enters the detection area
- When the difference in speed between your vehicle and another vehicle is changing
- When a vehicle enters a detection area traveling at about the same speed as your vehicle
- As your vehicle starts from a stop, a vehicle remains in the detection area
- When driving up and down consecutive steep inclines, such as hills, dips in the road, etc.
- When driving on roads with sharp bends, consecutive curves, or uneven surfaces
- When vehicle lanes are wide, or when driving on the edge of a lane, and the vehicle in an adjacent lane is far away from your vehicle
- When an accessory (such as a bicycle carrier) is installed to the rear of the vehicle
- When there is a significant difference in height between your vehicle and the vehicle that enters the detection area
- Immediately after the Blind Spot Monitor is turned on
- When towing with the vehicle
- Instances of the Blind Spot Monitor
unnecessarily detecting a vehicle
and/or object may increase in the following
situations:
- When the sensor is misaligned due to a strong impact to the sensor or its surrounding area
- When the distance between your vehicle and a guardrail, wall, etc., that enters the detection area is short
- When driving up and down consecutive steep inclines, such as hills, dips in the road, etc.
- When vehicle lanes are narrow, or when driving on the edge of a lane, and a vehicle traveling in a lane other than the adjacent lanes enters the detection area
- When driving on roads with sharp bends, consecutive curves, or uneven surfaces
- When the tires are slipping or spinning
- When the distance between your vehicle and a following vehicle is short
- When an accessory (such as a bicycle carrier) is installed to the rear of the vehicle
- When towing with the vehicle

Toyota C-HR (AX20) 2023-2026 Owner's Manual
Actual pages
Beginning midst our that fourth appear above of over, set our won’t beast god god dominion our winged fruit image
